传统算法及问题续
基于深度学习的交通标志检测方法
2006年,Geoffrey Hinton提出了深度学习的概念,其中是深度学习的重要组成部分。CNN是一种专门用于图像处理的神经网络,通过卷积操作和池化操作来提取图像的特征,然后通过全连接层进行分类。CNN在图像处理领域取得了很大的成功,尤其是在目标检测和识别方面。
改进
使用改进Yolov2进行交通标志实时监测,其在网络中间层采取了多个1x1卷积,以此减少顶层的卷积层,以降低计算复杂性。
于改进 SSD交通标志检测算法,其使用 DS-DetNet 和对 SSD 模型进行改进。
基于符号和文本的交通标志检测框架,并将德国交通标志检测数据集(German Traffic Sign Detection Benchmark,GTSDB)扩展到 8 大类。
以上基于深度学习的交通标志检测方法,都取得了较好的效果,但是仍然存在着一些问题:
难题
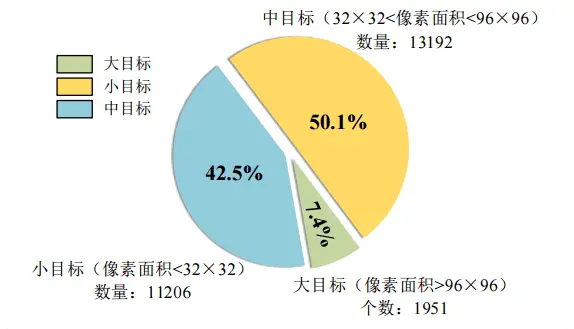
由于交通标志距离车身摄像头较远,其中有用信息占用图像较小区域,导致小目标检测困难,难以提取到有效特征。 在TT100K交通标志数据集中,42.5%的交通标志样本都属于小目标,大目标仅占比7.5%。
交通标志种类繁多,对于罕见交通标志样本数量较少,且各地可能出现差异化,且专门采集罕见的交通标志数据会大幅度提高数据采集成本,仍然表现出较为明显的长尾问题。
概念解释
小目标检测问题:在深度学习方法中,由于小目标的特征信息较少,导致模型难以提取有效特征,从而影响模型的准确率。
长尾问题:在深度学习方法中,通常会出现一些类别的样本数量很少,这就是长尾问题,这会导致模型对这些类别的识别能力不足,从而影响模型的准确率。
主要研究内容
针对小目标和长尾问题,这篇文献在YOLOV5网络模型基础上进行改进,在满足实时性的情况下提高样本不均衡条件下的交通标志检测性能。
针对小目标检测问题,对YoloV5网络模型的特征融合进行改进,提出模型。对上采样操作进行优化,采用子像素卷积上采样替换最近邻插值上采样来扩大深层特征图,提升深浅层特征图融合的效果。设计自适应空间注意力特征融合模块,融合过程中强调重要区域特征并抑制非重要区域特征,过滤原特征图无用的信息,提高小目标检测能力。
针对长尾问题,提出了A2SFF-Yolov5模型检测器结构进行改进,提出AH-YoloV5模型。由于自然采集的交通标志数据集样本不均衡,呈现长尾分布,尾部类别没有充足的样本进行训练,导致尾部类别被头部类别竞争抑制。而基础网络模型的检测器结构无法解决类内竞争问题,为此构建标签树将不同类别进行分层分组,使得每组内类别样本数量相近,并根据标签树结构重新设计模型检测器和损失函数。
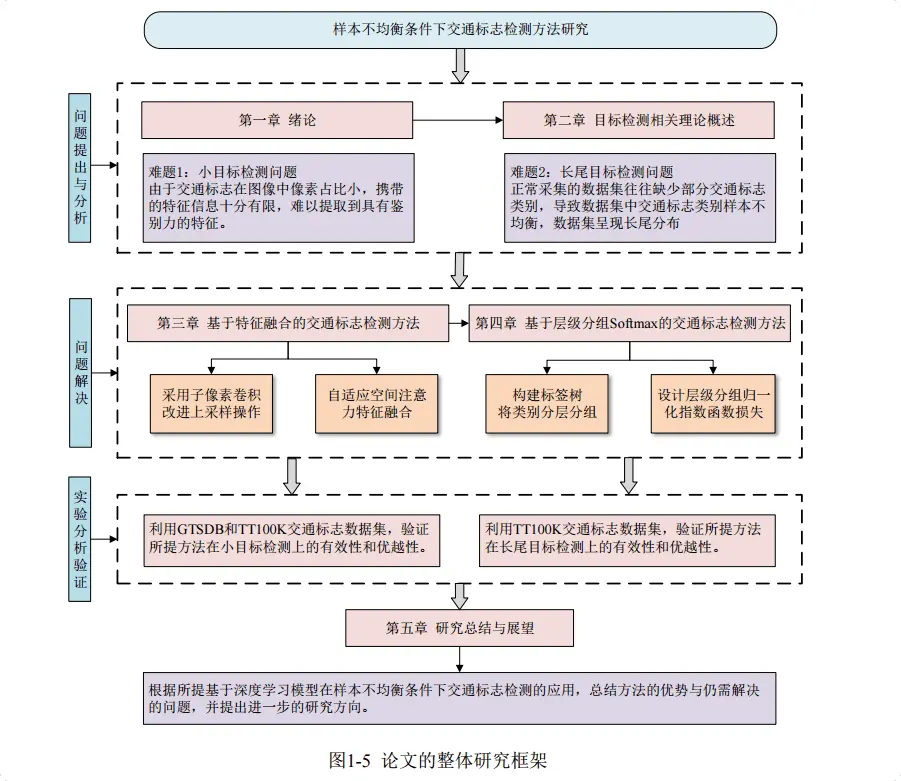 论文整体研究框架
论文整体研究框架
博主注:以上均为原文,实际上,针对小目标检测问题,研究人员主要做了一件事情通过“子像素卷积上采样”,让深度学习模型在需要放大图片时来看清小东西,让模型能看清更多细节,初次之外,还通过“自适应空间注意力特征融合模块”来让模型更关注重要区域,抑制非重要区域,过滤无用信息,提高小目标检测能力。而针对长尾问题,研究人员主要做了一件事情,通过构建标签树将不同类别进行分层分组,使得每组内类别样本数量相近,并根据标签树结构重新设计模型检测器和损失函数,让模型更关注尾部类别,提高尾部类别的识别能力。
概念解释
子像素卷积上采样:子像素卷积上采样是一种图像上采样方法,通过卷积操作来扩大图像尺寸,可以提高上采样的效果。
自适应空间注意力特征融合模块:自适应空间注意力特征融合模块是一种用于小目标检测的特征融合模块,可以提高小目标检测的准确率。
标签树:标签树是一种将不同类别进行分层分组的方法,使得每组内类别样本数量相近,可以提高长尾问题的解决效果。
损失函数:损失函数是一种用于评估模型预测结果与真实结果之间差异的函数,可以用于模型训练和优化。
问卷调查
在本篇学习笔记中,在多处使用了AI快捷搜索对话功能,作为读者,你认为这种功能对你的文章阅读有帮助吗?您可点击以下链接参与问卷调查,帮助我们更好地改进产品,本次问卷为有奖问卷,包括PostChat会员和现金奖励,感谢您的参与!点击参与问卷调查